׃�l�����p����ʽ���ؙC(j��)�ϵđ�(y��ng)��
1������
��ʽ���ؙC(j��)�ǹ��V��I(y��)��ʹ��ʮ�֏V����һ�N�bж�O(sh��)�䣬���ژ�ʽ���ؙC(j��)�Ĺ����h(hu��n)�����ӣ���(j��ng)����Ҫ�����d���l������(d��ng)���Ƅ�(d��ng)�������D(zhu��n)��׃�ٵȲ������_����������(d��ng)�������ڂ��y(t��ng)���^���-���|�����Ƶ�늚�ϵ�y(t��ng)�У����|�����|�^��늙C(j��)��(j��ng)���Л_����������ģ���ɾS�����S�o(h��)�ɱ��O�ߣ�������a(ch��n)��ͣ�a(ch��n)�pʧ���Ӳ��ɹ������҂��y(t��ng)�����ؙC(j��)�{(di��o)��ϵ�y(t��ng)�ľC�ϼ��g(sh��)ָ��(bi��o)�^��Ѳ��ܝM�㹤�I(y��)���a(ch��n)��Ҫ���{(di��o)�����ܸߡ������ɿ����S�o(h��)����Ľ���׃�l�{(di��o)��ϵ�y(t��ng)���ʽ���ؙC(j��)�Ŀ����ṩ��һ�Nȫ�µķ�����ԓ�������ƾ�·��(ji��n)�Ρ��\(y��n)�з�(w��n)�����S�o(h��)��С�����o(h��)�O(ji��n)�y(c��)�������ƣ��Ҹ�Ч����(ji��)�ܣ���˲��ý���׃�l�{(di��o)�������ؙC(j��)�����{(di��o)�ټ��g(sh��)�l(f��)չ��������
2.��ʽ���ؙC(j��)�ĽY(ji��)��(g��u)������
��ʽ���ؙC(j��)��һ�N�M���ڹ̶����g�Ͽ��Á����\(y��n)���N������O(sh��)�䡣һ��������С܇����ܽ��ٽY(ji��)��(g��u)������\(y��n)�ЙC(j��)��(g��u)����܇�\(y��n)�ЙC(j��)��(g��u)���Լ�늚�����O(sh��)����Ă�(g��)���ֽM�ɡ���������С܇�������\(y��n)�ЙC(j��)��(g��u)��С܇�\(y��n)�ЙC(j��)��(g��u)�M�ɡ���늚����ϵ�y(t��ng)�У��乩�һ����ͨ�^С܇��(d��o)��b�ã��o�������������ؙC(j��)���Դ��(d��o)��b�ã����������Ȳ����Դݔ�͵���������ϡ�
��ʽ���ؙC(j��)���Ԍ�(sh��)�F(xi��n)���������S���g�Ĵ�ֱ���M�v���\(y��n)��(d��ng)��ͨ�^��܇늄�(d��ng)�C(j��)�(q��)��(d��ng)��܇�g��߅��܉�����v��ǰ���\(y��n)��(d��ng)��С܇�������C(j��)��(g��u)��С܇늄�(d��ng)�C(j��)�(q��)��(d��ng)�ؘ���ϵ�܉�����M�������\(y��n)��(d��ng)������������r(sh��)������늄�(d��ng)�C(j��)�(q��)��(d��ng)����ֱ�����\(y��n)��(d��ng)����D1��ʾ
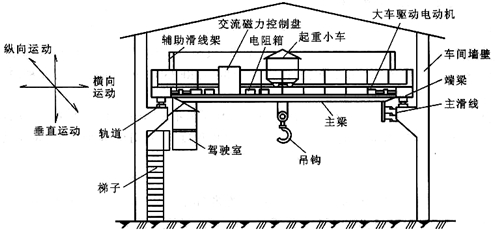
�D1 ��ʽ���ؙC(j��)����Ҫ�Y(ji��)��(g��u)���\(y��n)��(d��ng)��ʽ
���y(t��ng)�Ę�ʽ���ؙC(j��)һ������^���-���|�����ƣ�늙C(j��)�齻���@��ʽ늄�(d��ng)�C(j��)�������D(zhu��n)�Ӵ����ķ�������(d��ng)���{(di��o)�٣���D2��ʾ������(d��ng)�r(sh��)�������|�����߽����|�����ϣ�늴��Ƅ�(d��ng)�����|�����ϴ��_���l���{(di��o)������ϵĽ��|������(d��ng)����늙C(j��)�����D(zhu��n)��(d��ng)����(d��ng)��Ҫ׃�ٕr(sh��)ͨ�^�����{(di��o)������ϵIJ�ͬ���|������׃�D(zhu��n)�Ӿ�Ȧ�����ֵ���_(d��)����׃늙C(j��)���D(zhu��n)�١�ԓ��Ʒ�ʽȱ�����@����Ҫ��ӳ��Ч�ʷdz��ͣ����������D(zhu��n)��ʵ����ā�Qȡ�D(zhu��n)�ٵĽ��͡��D(zhu��n)��Խ����Ч��Խ�ͣ��ֹ��ʱ��D(zhu��n)�Q�ɟ��ܶ����ĵ�������׃�l�{(di��o)�ٷ������ܺܺõؽ�Q�@��(g��)���}��׃�l�{(di��o)����ͨ�^��׃���ӹ���l�ʁ��_(d��)��늙C(j��)�{(di��o)�ٵ�Ŀ�ģ��oՓ�D(zhu��n)�ٸߵͣ���C(j��)е���Ի������c��Ȼ�C(j��)е����ƽ�У������ĵ��D(zhu��n)��ʶ�������׃�����Ч�ʺܸߣ��������@�Ĺ�(ji��)�Ч�������{(di��o)�ٵ�ƽ��(w��n)�Դ����ߡ��ڹ�(ji��)�ܡ��p�پS�ޡ���߮a(ch��n)Ʒ�a(ch��n)�����a(ch��n)Ʒ�|(zh��)���ȷ��涼ȡ�������@�Ľ�(j��ng)��(j��)Ч�棬��늙C(j��)�{(di��o)�ٵİl(f��)չ�������`���a(ch��n)��
�D2 �����C(j��)��(g��u)늚�D
3.׃�l�{(di��o)��ϵ�y(t��ng)�x�ͷ���
�S�������Ӽ��g(sh��)�İl(f��)չ��׃�l�������ܺͷ�(w��n)���Եõ��˘O�����ߣ�ʹ�����ؙC(j��)���\(y��n)��׃�l��׃?y��u)��˿��ܣ��Ķ������Ͻ�Q�˂��y(t��ng)��ʽ���ؙC(j��)늿�ϵ�y(t��ng)��ȱ�c(di��n)���������O(sh��)����ʹ��׃�l�{(di��o)�ٿ��Ʊ�����˽����ؙC(j��)���\(y��n)�ЙC(j��)��(g��u)��(du��)����(d��ng)ϵ�y(t��ng)��Ҫ��
��1��׃�l�������ؙC(j��)����(g��)�����^���е��������Ԟ飬����(d��ng)���ش���2���~���D(zhu��n)�أ������������ڰ���Еr(sh��)������(d��ng)���ر��~���D(zhu��n)�ش�ö࣬�ڵ��l�r(sh��)�����ݔ��100%�����~���D(zhu��n)�ء�
��2���\(y��n)��ƽ��(w��n)���Ӝp��ƽ��������(d��ng)��ֹͣ�r(sh��)׃�l��ݔ���c�Ƅ�(d��ng)�����Ƅ�(d��ng)�D(zhu��n)�ر��ƽ���^�ɣ��o���^�F(xi��n)��l(f��)�����ڼӜp���^���п��������ٶ��B�m(x��)���oײ���С�
��3�������C(j��)��(g��u)���л�o��ͣ܇�Լ���С܇�\(y��n)�ЙC(j��)��(g��u)���p�ٕr(sh��)��׃�l���ܽo�������~���D(zhu��n)�ص��Ƅ�(d��ng)���أ�����늙C(j��)��̎�ڰl(f��)늠�B(t��i)����׃�l�������������˕r(sh��)����܌��@������������̎������
��4���\(y��n)���^�������ڵ�܉��ƽ����LͲż�����F(xi��n)䓽z�K�g�K���Լ������x�_����|����r(sh��)��(hu��)����늙C(j��)���ص���׃��׃�l���ܳ����@�N��׃���M(j��n)��ƽ�����ơ�
ᘌ�(du��)�������ؙC(j��)��(du��)׃�l�����\(y��n)��Ҫ��׃�l�{(di��o)��ϵ�y(t��ng)����Ҫ�O(sh��)�䌢�������·����x��
3.1 ׃�l���������x��
3.1.1 �����C(j��)��(g��u)����/�� �^���(q��)��(d��ng)׃�l��������P0��kVA����
P0��K��K1��Pm/(�ǡ�cos��) ��1��
ʽ�� Pm�Dؓ(f��)�d��Ҫ���늄�(d��ng)�C(j��)�S��ݔ�����ʣ�kW����
K�D������ε�����ϵ��(sh��)��һ���1.05 ~1.1����
K1�D�����^�dϵ��(sh��)��һ��ȡ1.1~1.2����
�ǨD늄�(d��ng)�C(j��)Ч�ʣ�ͨ���s0.85����
cos�ըD늄�(d��ng)�C(j��)�Ĺ������أ�ͨ���s0.75����
3.1.2ƽ�ƙC(j��)��(g��u)������܇С܇�أ������D(zhu��n)�C(j��)��(g��u)�������ö��_(t��i)늙C(j��)����(d��ng)������(q��)��(d��ng)׃�l������һ�϶���ʽ��׃�l��������������ڿ�ؓ(f��)�d����������
ICN��k��n��In ��2��
ʽ�� k�D�����������ϵ��(sh��)��PWM�{(di��o)�ƕr(sh��)ȡ1.05~1.1��
In�D���l�r(sh��)���_(t��i)늄�(d��ng)�C(j��)�~��ݔ�������A����
ICN�D׃�l���~��ݔ�������A����
n�D늄�(d��ng)�C(j��)�Ĕ�(sh��)����
3.2 �Ƅ�(d��ng)��Ԫ���Ƅ�(d��ng)�����x��
3.2.1ƽ�ƙC(j��)��(g��u)�Ƅ�(d��ng)��Ԫ���Ƅ�(d��ng)�����x��
ƽ�ƙC(j��)��(g��u)�(q��)��(d��ng)�ϵ��Ƅ�(d��ng)��Ԫ���Ƅ�(d��ng)���һ�㰴��Ҏ(gu��)׃�l����(du��)�Ƅ�(d��ng)��Ԫ���Ƅ�(d��ng)���Ę�(bi��o)��(zh��n)�����M(j��n)���x��
3.2.2�����C(j��)��(g��u)�Ƅ�(d��ng)��Ԫ���Ƅ�(d��ng)�����x��
�����C(j��)��(g��u)���½��^����������������r(sh��)�g�L���鱣�C׃�l���������������������Ƅ�(d��ng)��Ԫ���Ƅ�(d��ng)��衣
��1�����ֵRB ��Ӌ(j��)��
RB����С���ֵRmin��׃�l����������ֵI(max)���Ƅ�(d��ng)��Ԫ���g(sh��)Ҏ(gu��)��Q������
Rmin= VC /I(max) ��3��
��M���Ƅ�(d��ng)���ص�Ҫ��������ֵRmax������Ƅ�(d��ng)����PB(max)��ã�
Rmax=V2C / PB(max)= V2C /��130%��Pe�� ��4��
����ȡֵ������
Rmin��RB��Rmax ��5��
ʽ�� VCһ���700V
Pe�D늙C(j��)�~������
��2������~������PR
PR��0.8 Pe/m ��6��
ʽ�� m�D���Ĺ��������ʣ��������x���փ�(c��)�鵽��һ�㰴1.5Ӌ(j��)�㡣
4.׃�l�{(di��o)��ϵ�y(t��ng)�O(sh��)Ӌ(j��)
4.1 ׃�l�{(di��o)��ϵ�y(t��ng)��늚��O(sh��)Ӌ(j��)
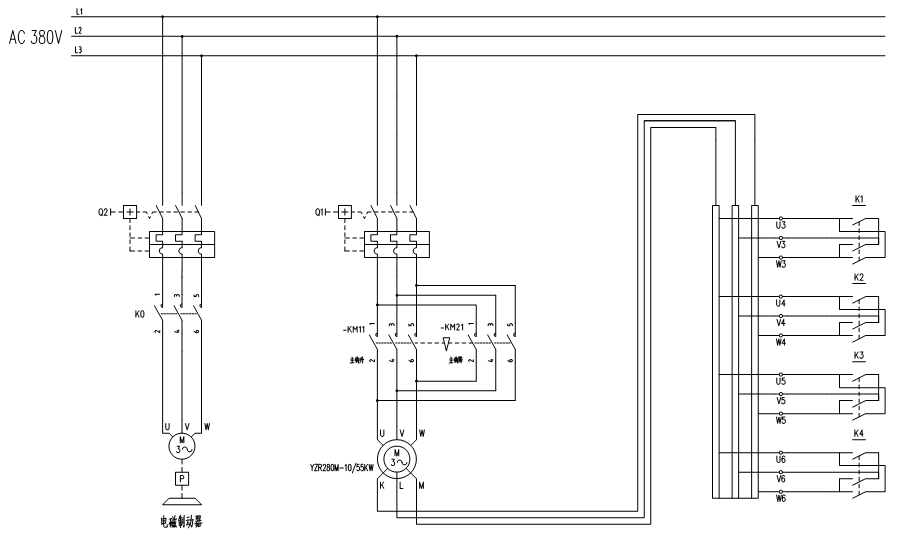
�F(xi��n)�Խ��K���ij׃�����S50T�p����ʽ���ؙC(j��)�����C(j��)��(g��u)׃�l���������Ԕ��(x��)�f�����ؙC(j��)׃�l�{(di��o)�ٵ��O(sh��)Ӌ(j��)���E��ԓ���ؙC(j��)�����C(j��)��(g��u)�(q��)��(d��ng)늙C(j��)���õ���YZR315S-10 ��늙C(j��)�����ʞ�55KW������(j��)ʽ��1����늙C(j��)����(sh��)Ӌ(j��)��õ������C(j��)��(g��u)�����׃�l��������95KVA���F(xi��n)�����ķ�늚���������d��ʸ��׃�l��A510-4T0750׃�l����ԓ׃�l��������98KVA���Ҿ��г���(qi��ng)���^�d�����͆���(d��ng)�����Լ���N���ͺꅢ��(sh��)��һ������O(sh��)�ã���(n��i)�õ������V������늿����p�����C��������(qi��ng)�˿��ɔ_����˷dz��m�����ؙC(j��)�����C(j��)��(g��u)�Ĺ��r��(y��ng)�ã��Ƅ�(d��ng)������(j��)ʽ��3������6����á����w�O(sh��)Ӌ(j��)��D3��ʾ�����ڲ���Ҫ������{(di��o)�٣����Ҫ��늙C(j��)���D(zhu��n)�Ӷ̽ӣ� K1��K2�����D(zhu��n)���D(zhu��n)��̖(h��o)��K3��K4��K5�����ٿ�����̖(h��o)��늴��Ƅ�(d��ng)���|������늴��Ƅ�(d��ng)���ı��l��(d��ng)����
�D3�����C(j��)��(g��u)׃�l����늚��O(sh��)Ӌ(j��)�D
�{(di��o)ԇ����(sh��)����
��늙C(j��)����O(sh��)�����
���(sh��)��
F2.0.00=55 늙C(j��)�~������
F2.0.01=380 늙C(j��)�~��늉�
F2.0.02=123.3 늙C(j��)�~�����
F2.0.03=50 늙C(j��)�~���l��
F2.0.04=580 늙C(j��)�~���D(zhu��n)��
�O(sh��)��F2.2.53=1��Ȼ�����\(y��n)���IFWD��׃�l�����M(j��n)��늙C(j��)����(sh��)�R(sh��)�e���R(sh��)�e������
���(sh��)�O(sh��)��׃�l��
F0.1.22=3.5 �����l���O(sh��)��3.5HZ
F0.2.29=10 ���^һ���l��
F0.3.33=1 ���������O(sh��)�Þ��ⲿ���ӿ���
F1.0.03=8 ���ٕr(sh��)�g�O(sh��)�Þ�8S
F1.0.04=3 �p�ٕr(sh��)�g�O(sh��)�Þ�3S
F1.1.13=4 �d���l���O(sh��)��4K
F1.4.39=200% �Ӝp���������ˮƽ
F1.4.42=0011 �{(di��o)�l�����{(di��o)��(ji��)�������P(gu��n)�]
F3.0.00=1 DI1�O(sh��)�Þ����ٿ���1
F3.0.01=2 DI2�O(sh��)�Þ����ٿ���2
F3.0.02=3 DI3�O(sh��)�Þ����ٿ���3
F3.0.03=7 DI4�O(sh��)�����D(zhu��n)
F3.0.04=8 DI5�O(sh��)�Þ鷴�D(zhu��n)
F3.0.05=13 DI6�O(sh��)�Þ���Ϗ�(f��)λ
F3.1.12=6 DO1ݔ���O(sh��)�Þ����ݔ��
F3.1.21=71 TA-TCݔ���O(sh��)�Þ鱧�lݔ��
F3.1.27=0 �O(ji��n)����1�O(ji��n)��׃���O(sh��)�Þ�ݔ���l��
F3.1.28=0 �O(ji��n)����2�O(ji��n)��׃���O(sh��)�Þ�ݔ���l��
F3.1.30=6.5 �O(ji��n)����1����ֵ�O(sh��)�Þ�6.5%��3.25HZ��
F3.1.31=6.5 �O(ji��n)����1����ֵ�O(sh��)�Þ�6.5%��3.25HZ��
F3.1.32=13 �O(ji��n)����2����ֵ�O(sh��)�Þ�13%��6.5HZ��
F3.1.33=13 �O(ji��n)����2����ֵ�O(sh��)�Þ�13%��6.5HZ��
F5.3.29=1 �����l������ģʽ����������l�ʕr(sh��)ݔ�������l��
F6.0.00=20 ���^�����l��
F6.0.01=30 ���^�����l��
F6.0.02=40 ���^�����l��
F6.0.06=50 ���^�����l��
FF.0.00=0001 ���S��FF�M����(sh��)
FF.0.01=14 SDO1��p���\(y��n)���^����
FF.0.03=64 ��(du��)SDO1ȡ�� ���ǜp���^����
FF.0.04=27 �x��O(ji��n)����1
FF.0.05=14 �p���^����
FF.0.06=30 �x��O(ji��n)����2
FF.0.07=67 ��SDO3��SDO4߉�c���ǜp���^���бO(ji��n)����1��Ч��
FF.0.08=68 ��SDO5��SDO6߉�c���p���^���бO(ji��n)����2��Ч��
4.2���ؙC(j��)׃�l�{(di��o)��ϵ�y(t��ng)�Ŀ���Ҫ�c(di��n)
��ʽ���ؙC(j��)����ϵ�y(t��ng)�У���܇��С܇һ����һ�_(t��i)׃�l�������_(t��i)늙C(j��)�����׃�l������U/F���Ʒ�ʽ���������C(j��)��(g��u)��һ��(du��)һ���ƣ���@�����õ����ܲ��ßo��ʸ������ģʽ����ʹ���ؙC(j��)�چ���(d��ng)��ֹͣ�r(sh��)��ʹ늴��Ƅ�(d��ng)���c׃�l��ݔ���D(zhu��n)��ƽ���^�ɣ�����{(di��o)����늴ű��l�r(sh��)��늴��Ƅ�(d��ng)�����l�����l˲�g���O�a(ch��n)�����^�F(xi��n)����ƽ���^�ɡ�Ҫ��Q�@��(g��)���}��Ҫ��׃�l���\(y��n)�Еr(sh��)�c�Ƅ�(d��ng)����(d��ng)������ϕr(sh��)�������֣��������ؙC(j��)����(d��ng)�^�����Ƅ�(d��ng)�����l�^�磬�װl(f��)�����^�����l�^����늙C(j��)���D(zhu��n)��׃�l����(b��o)���ϣ�����ͣ�C(j��)�^���У������l�^�磬�_�������׃�l����(b��o)���ϣ����l�^����ݔ������С���װl(f��)�����^����ˣ�ͨ�^���¿���Ҫ�c(di��n)���ԺܺõĽ�Q�ˆ��}��
1�����ؙC(j��)�چ���(d��ng)�^���еĿ���Ҫ�c(di��n)
ͨ�^�O(sh��)�����l�l�ʙz��ֵ�͙z�y(c��)����r(sh��)�g�����l�ʵ��_(d��)�z��ֵͬ�r(sh��)��׃�l���z�y(c��)ݔ���������(d��ng)�������r(sh��)��늙C(j��)��ݔ�������ܵ��������½����ؕr(sh��)�l(f��)�����l��̖(h��o)��ʹ�Ƅ�(d��ng)��늴��F��(d��ng)�����_���l������S�֕r(sh��)�g��(y��ng)����늴��F��(d��ng)���r(sh��)�g��ͬ�r(sh��)߀��Ҫ����������(sh��)���C(j��)е�ϵ���ϣ��磺׃�l���ļӜp�ٕr(sh��)�g�Լ�늴��Ƅ�(d��ng)�����ɵ��ɾo�̶ȵȡ�
2�����ؙC(j��)��ͣס�^���еĿ���Ҫ�c(di��n)
�O(sh��)�����l�l�ʙz��ֵ���l�ʾS�֕r(sh��)�g��һ������Ƅ�(d��ng)����(d��ng)���r(sh��)�g0.6S������ͣ�C(j��)�r(sh��)����(d��ng)׃�l��ݔ���l�ʵ��_(d��)���l�l�ʕr(sh��)��׃�l��ݔ�����l��̖(h��o)���Ƅ�(d��ng)�����Ƅ�(d��ng)��늴��F��늱��l��(d��ng)���_ʼ���˕r(sh��)�S��һ�Εr(sh��)�g��ֱ�����l��(d��ng)����ɣ�Ȼ��׃�l��ݔ���l�ʽ���0Hz�����w����߉��D4��ʾ��
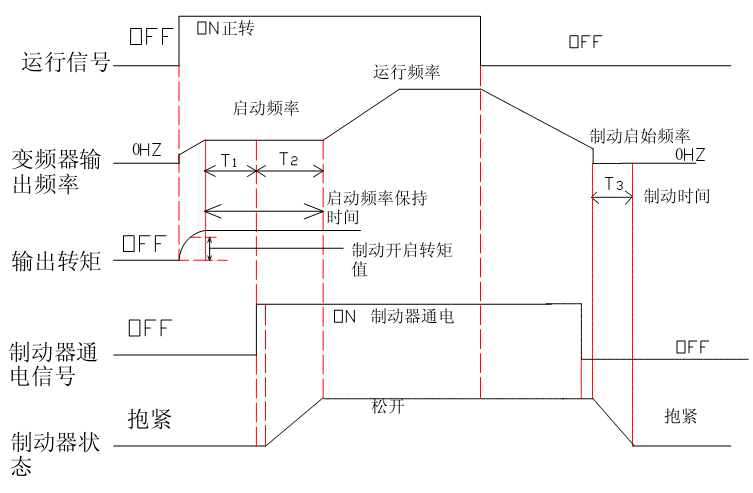
�D4 늚�C(j��)е�Ƅ�(d��ng)����߉
5.�Y(ji��)Փ
ͨ�^�����ĬF(xi��n)��(ch��ng)�y(c��)ԇ���Լ���ԓ�Sԭ��ϵ�y(t��ng)��ȣ��{(di��o)�پ��ȸߣ��\(y��n)��ƽ��(w��n)���ӿ����b���ٶȣ�����˹���Ч�ʣ�ͬ�r(sh��)��(sh��)�F(xi��n)�˵��lܛ����(d��ng)��ܛֹͣ��ʹϵ�y(t��ng)����(d��ng)��ֹͣƽ��(w��n)�������ˌ�(du��)�C(j��)е�C(j��)��(g��u)�ě_����Ҳ�����ˌ�(du��)늾W(w��ng)����Ⱦ��ʹ�S�o(h��)�M(f��i)�ô�ͣ��ҹ�(ji��)��Ч���@��������(y��n)�C�ı��ķ�������Ч�ԣ��Ϳ����ԡ�